

El científico RUDN comparó los algoritmos para resolver el problema de control óptimo
En los sistemas en los que hay varios objetos que necesitan especificar una secuencia de acciones, se produce la llamada tarea de control óptimo. Por ejemplo, en la tarea de controlar una nave espacial o el sistema tributario de un país. Matemáticamente, esto significa minimizar o maximizar cualquier parámetro del sistema (por ejemplo, minimizar el tiempo o maximizar el empleo de la población). No existe una forma universal generalmente aceptada de analizar numéricamente tales sistemas, pero existen muchos enfoques y algoritmos. Los investigadores de RUDN y FITZ" Informática y gestión " de la Academia de Ciencias de Rusia propusieron dos enfoques basados en varios algoritmos informáticos modernos para resolver el problema del control óptimo de un grupo de robots.
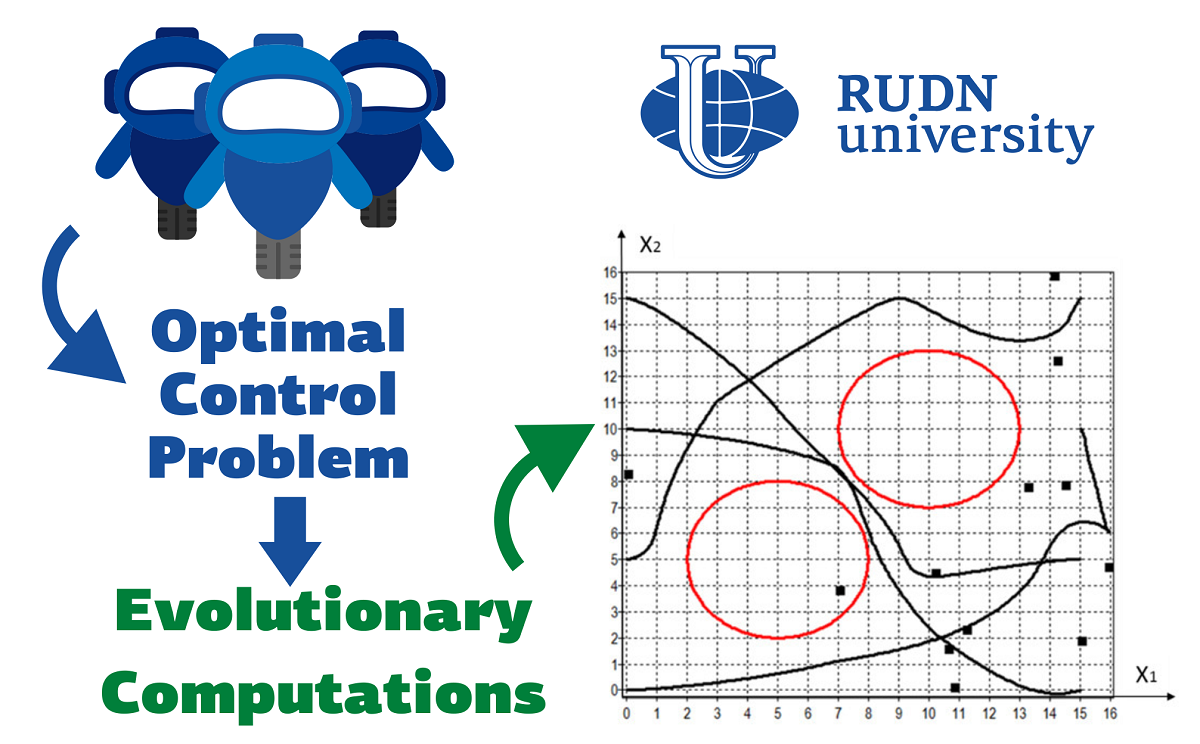
«Un grupo de robots debe moverse de los Estados iniciales dados a los Estados finales, evitando obstáculos, en un tiempo mínimo. La tarea pertenece a la clase de optimización de dimensión infinita. Hay dos clases de métodos para resolverlo numéricamente. Los métodos directos se basan en la reducción al problema de optimización de dimensión finita. Los métodos indirectos se basan en la aplicación del principio del máximo de Pontryagin para la transición a la tarea de borde y su posterior solución numérica», Sergey Konstantinov, profesor titular del Departamento de mecánica y procesos de gestión de RUDN.
Los científicos han propuesto dos enfoques para resolver el problema de la gestión óptima basada en métodos directos. En la tarea de prueba, los robots deben pasar del punto de Inicio al final y no chocar con obstáculos y otros robots. En el primer enfoque, un grupo de robots fue visto como un solo objeto. La tarea de control óptimo en este caso se reduce a la tarea de programación no lineal. Esto significa que no se puede reducir a un sistema de ecuaciones lineales, lo que complica la tarea. En el segundo enfoque para cada robot, primero se realizó una búsqueda de atractores: puntos especiales en el plano del movimiento del robot, cuya tarea es «sugerir» al robot cómo evitar los obstáculos en el camino. A continuación, los resultados obtenidos se utilizaron para resolver todo el problema original. Los cálculos de los dos enfoques se implementaron con la ayuda de algoritmos evolutivos y el método de búsqueda aleatoria. Los científicos realizaron 10 pruebas para cada uno de los cuatro algoritmos evolutivos y el método de búsqueda aleatoria y compararon su rendimiento.
La efectividad de dos enfoques y 5 algoritmos (método de búsqueda aleatoria y 4 algoritmos evolutivos: algoritmo genético, método de enjambre de partículas, algoritmo de abeja y algoritmo de lobo gris) se evaluó en función del valor de la función objetivo, una función que debe minimizarse en el problema de control óptimo. Cuanto más pequeño es, mejor lo hizo el algoritmo. Para el primer enfoque, todos los algoritmos evolutivos resultaron ser más efectivos que el método de búsqueda aleatoria. El «método de enjambre de partículas» funcionó mejor, el valor de la función objetivo promedió 5,5. Para el método de búsqueda aleatoria, este valor resultó ser casi tres veces mayor: 15,83. Para el segundo enfoque, el método de búsqueda aleatoria también resultó ser el menos efectivo. Los algoritmos evolutivos funcionaron de manera aproximadamente igualmente eficiente. En una de las pruebas, el algoritmo del lobo gris dio el valor mínimo de la función objetivo: 2,49.
«No hay métodos numéricos universales para resolver problemas de gestión óptima. Planeamos estudiar más a fondo el uso de algoritmos evolutivos y considerar otros algoritmos evolutivos nuevos, incluidos los híbridos», Sergey Konstantinov, profesor titular del Departamento de mecánica y procesos de control de RUDN.
Los resultados se publican en la revista Applied Sciences.
En la sesión del nuevo consejo de tesis de la RUDN para las especialidades 2.1.12 “Arquitectura de edificios y construcciones. Conceptos creativos de la actividad arquitectónica” y 2.1.11 “Teoría e historia de la arquitectura, restauración y reconstrucción del patrimonio histórico-arquitectónico”, se otorgaron por primera vez en la historia de la universidad los grados científicos de Candidatos a Doctor en Arquitectura a tres estudiantes de posgrado: Natalia Kalínina, Evgueni Oguienko y Yulia Logínova.
En la RUDN se dieron a conocer los nombres de los científicos más destacados según los resultados de 2025. El tradicional ranking del personal científico-pedagógico, que se realiza desde 2023, determinó a los líderes en tres categorías clave: “El científico más citado”, “Líder en comercialización de RAI” y “Mejor director de proyectos subvencionados”.
En la RUDN tuvo lugar la ceremonia solemne de entrega del premio anual en el ámbito de la ciencia y la innovación. Sus poseedores fueron cuatro científicos de la universidad: Dmitri Kucher, Olga Lomákina, Konstantín Gomonov y Viacheslav Beguishev.